We'll start with the classic F = ma (Force equals mass times acceleration.)
In our prior function calls, we calculated the total force applied to the body. Since we know its mass, it's easy to calculate acceleration:

F is the force, in newtons.
m is the mass, in kilograms.
a is the acceleration, in meters per second squared.
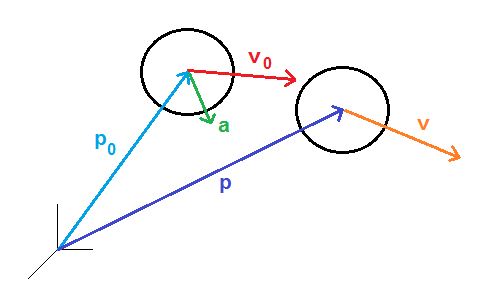
And with the acceleration, we know how to propagate location and velocity:

p is the newly calculated position, in meters.
p0 is the initial position. in meters.
v0 is the initial velocity, in meters per second.
t is the time step of the simulation, in seconds.
a is the acceleration, in meters per second squared..

v is the newly calculated velocity, in meters per second.
v0 is the initial velocity, in meters per second.
a is the acceleration, in meters per second squared.
t is the time step of the simulation, in seconds.
Rotation code is still a work in progress so that will have to wait for a future post.
https://en.wikipedia.org/wiki/Kinematics

Orbital Aero Code - update()
A refresher of our update() function in the OrbitalAeroModel class.
// Primary function to process the physics and kinematics all bodies.
bool OrbitalAeroModel::update(double timeStep_seconds)
{
// It's important all forces are calculated before all positions are updated before all collisions
// are checked, etc. That way the order in which bodies are looped through does not affect how they
// affect other bodies in space.
// Calculate Motor Thrust (From control system and motor abilities.)
// Sum all the forces acting on every body, including forces from thrust, gravity, atmospheric drag,
// and friction.
processForces();
// Can now translate and rotate each body.
processKinematics(timeStep_seconds);
// After moving the body, check for collisions and adjust positions/velocities as appropriate.
processCollisions(timeStep_seconds);
return true;
}
Orbital Aero Code - processKinematics()
And the new code:
// Translate and rotate bodies based on their mass, moments of inertia, and forces.
bool OrbitalAeroModel::processKinematics(double timeStep_seconds)
{
// Loop through all bodies and reposition them based on the forces.
map <uint64, BodyModel>::iterator iteratorPrimaryBody = tableBodies.begin();
while (iteratorPrimaryBody != tableBodies.end())
{
BodyModel &primaryBody = iteratorPrimaryBody->second;
if (primaryBody.active)
{
// Translation
if (primaryBody.massTotal_kilograms() > 0.0)
{
primaryBody.acceleration_metersPerSecond2 = primaryBody.forceTotal_newtons() / primaryBody.massTotal_kilograms();
}
else
{
primaryBody.acceleration_metersPerSecond2 = 0.0;
}
primaryBody.location_meters += (primaryBody.acceleration_metersPerSecond2 * (0.5 * timeStep_seconds * timeStep_seconds)) + (primaryBody.velocity_metersPerSecond * timeStep_seconds);
primaryBody.velocity_metersPerSecond += primaryBody.acceleration_metersPerSecond2 * timeStep_seconds;
// Rotation
// Not yet complete.
} // (primaryBody.active)
iteratorPrimaryBody++;
} // (iteratorPrimaryBody != tableBodies.end())
return true;
}
Results
Nothing really new to look at that we haven't seen in previous screenshots. So here's a screenshot of a satellite moving around the moon that's moving around the Earth (with history trails on)...

Copyright (c) 2016 Clinton Kam
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
No comments:
Post a Comment